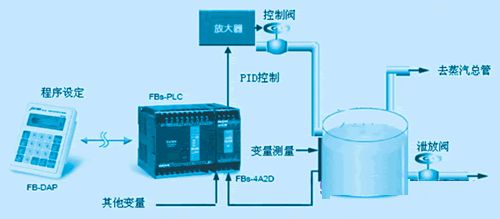
什麽是(shì)PID?
PID,就是“比例(lì)(proportional)、積(jī)分(fèn)(integral)、微(wēi)分(derivative)”,是一(yī)種很常見的控製算法。
PID已(yǐ)經有107年的曆史了 。
。
它並不(bú)是什麽很神(shén)聖的東西,大家(jiā)一定都見過PID的實際(jì)應用。
比如四軸飛行器,再比如平衡小(xiǎo)車......還有汽車的定速(sù)巡航、3D打印(yìn)機上的溫度控製器....
就(jiù)是類似於這(zhè)種:需要將某一個物(wù)理量(liàng)“保持穩定”的(de)場合(比如維持平衡,穩定溫度、轉速等),PID都會派上大用場(chǎng)。
那麽問題來了:
比如(rú),我想控製一個“熱得快”,讓一鍋水的(de)溫(wēn)度保持在50℃,這(zhè)麽簡單的任務(wù),為啥要用到微積分的理論呢 。
。
你(nǐ)一定在想(xiǎng):
這不是so easy嘛~ 小於50度就讓它(tā)加熱(rè),大於50度就斷電,不就行了?幾行代碼用Arduino分分鍾寫出(chū)來。
沒錯~在要求不高的情況下,確(què)實可以這(zhè)麽幹~ But!如果換一種說法,你就知道問(wèn)題出在哪(nǎ)裏了:
如果我的控製對象是(shì)一輛汽車呢?
要是希望汽車的車速保持在50km/h不動,你還敢這(zhè)樣幹麽。
設想(xiǎng)一下,假如汽車的定(dìng)速巡航電腦在某一時間測到車速是45km/h。它立刻命(mìng)令發動機:加速!
結果,發(fā)動機那(nà)邊突然來了個100%全(quán)油門,嗡的一下,汽車急加速到(dào)了60km/h。
這時電腦又發出命令(lìng):刹車!
結果,吱...............哇............(乘客吐)

所以,在大多(duō)數場合中,用(yòng)“開關量”來控製一個物理量,就顯得比較簡單粗暴了。有(yǒu)時候,是無法保(bǎo)持穩定的。因為單片機、傳感器不是無限快的,采集、控製需要時間。
而且,控(kòng)製(zhì)對象具有(yǒu)慣(guàn)性。比如你將一個加熱器拔掉,它的“餘熱(rè)”(即熱慣性)可(kě)能還會使水溫繼續升高一小會。
這(zhè)時,就需要一種『算法』:
它可以將需要控製的物理量(liàng)帶到目標附近
它可以“預(yù)見”這個(gè)量(liàng)的變化(huà)趨勢
它也可以消除因為散熱、阻力等因素造成的靜態誤差
....
於(yú)是,當時的數學家們發明(míng)了這一曆(lì)久不(bú)衰的(de)算法——這(zhè)就是PID。
你應該已經知道了,P,I,D是三(sān)種不同的調節作用(yòng),既可以(yǐ)單獨使用(P,I,D),也可以兩個兩個用(PI,PD),也可以三個一起用(PID)。
這三種作用有什麽區別呢?客官別急,聽我慢慢(màn)道(dào)來
我們先隻說PID控(kòng)製器的三個最基本的參數:kP,kI,kD。
kP
P就是比例的意思。它的作用最明顯,原理也最簡單。我們先說這個:
需要控(kòng)製的量,比如水溫,有它現在的『當前值』,也(yě)有我們期望的『目標值』。
當兩者差距不大時,就讓加熱器“輕輕地”加熱一下。
要是因為某些原因,溫度降低了很多,就讓加熱器(qì)“稍稍用力”加熱一下。
要是當前溫度比目標(biāo)溫度低得多,就讓加熱器“開足馬力”加熱,盡快(kuài)讓水溫到達(dá)目標附近。
這就(jiù)是P的作用,跟開關控製方法相比,是不是“溫文爾雅”了(le)很多 。
。
實際寫程序時,就讓偏差(目標減去當前)與調節裝置的“調節(jiē)力度”,建立一個一次函數的關係,就可以實現最基本的“比例”控製了~
kP越大,調節作(zuò)用越激進,kP調小會讓調節作用(yòng)更(gèng)保守。
要是你正在製作一個平衡車,有了(le)P的作用(yòng),你會發現,平衡車在平衡角度附近來回“狂抖(dǒu)”,比較難穩住。
如果已(yǐ)經到了這(zhè)一步——恭喜你!離成功隻差一小步了~
kD
D的作用更好理解一些,所以(yǐ)先說說D,最後說I。
剛才我們有了P的作用。你不難發現,隻有P好像不能讓平衡車站起來,水溫也控製(zhì)得(dé)晃晃悠悠,好像整個係統不是特別穩(wěn)定,總是在“抖(dǒu)動”。
你心裏設想一個(gè)彈簧:現在在平衡位置上。拉它(tā)一下,然後鬆手。這時它會震蕩起來。因為阻力很小,它(tā)可能會震蕩很長時間,才會重新停在平衡位置。
請想象一下:要是把上圖所(suǒ)示的係統浸沒在水裏,同(tóng)樣拉它一下 :這種情況(kuàng)下,重新停在平衡位置的時間就短得(dé)多。
我們需要一個控製作用,讓被控製的物理量的“變化(huà)速(sù)度”趨於0,即類似(sì)於“阻尼”的作用。
因為(wéi),當比較接近(jìn)目標時,P的控製作用就比較小了。越接近目標,P的作用越溫柔。有(yǒu)很多內在的或者外部的因素,使控製(zhì)量發生小範圍的擺動。
D的作用就(jiù)是讓物理(lǐ)量的速度趨於0,隻要什麽時候,這(zhè)個量具有了速度,D就向相反的方向用力,盡力刹(shā)住這個變化。
kD參數(shù)越(yuè)大,向速(sù)度相反方向(xiàng)刹車的(de)力道就越強(qiáng)。
如果是平衡小車,加上(shàng)P和D兩種控製(zhì)作用,如果參數調節合適,它應該可以站起來了(le)~歡呼吧 。
。
等等(děng),PID三兄弟好像還有一位。看起來PD就可以讓物理量保持穩定,那還要(yào)I幹嘛?
因(yīn)為我們忽視了一種重要的情(qíng)況。
kI
還是以(yǐ)熱(rè)水為例。假如有個(gè)人把我們的加熱裝置帶到了非常冷的地方,開始燒水了。需要燒到50℃。
在P的作用下,水溫慢慢升高(gāo)。直到升高到45℃時(shí),他(tā)發現了一個不好的事情:天(tiān)氣太冷,水散熱的速度,和P控製的加熱的速度相等了。
這可怎麽(me)辦?
P兄這樣想:我和目標已經很近了,隻需要輕輕(qīng)加熱就(jiù)可以了。
D兄這樣(yàng)想:加熱和(hé)散熱相等,溫度沒有波動,我好像不用調整什麽。
於是,水溫永遠地停留在45℃,永遠到不了50℃。
作為一個人,根據常識,我(wǒ)們知道,應該進一步(bù)增加加熱的功率。可是(shì)增(zēng)加多少該如(rú)何計算呢?
前輩科學家們想到(dào)的方法是真的巧妙。
設置一個積(jī)分量(liàng)。隻要偏差存在,就不斷地對偏差進行積分(累加),並反應在(zài)調(diào)節力度上。
這樣一來,即使45℃和50℃相差不太大,但是隨著時間的(de)推(tuī)移,隻要沒達到(dào)目標溫度,這個(gè)積分量就不斷增加(jiā)。係統就會慢慢(màn)意識到:還沒有到達目標溫度,該增加功率啦!
到了(le)目標(biāo)溫度後,假設溫(wēn)度沒(méi)有波動,積分值就(jiù)不會再變動(dòng)。這時,加熱功率仍然等於(yú)散熱功率。但是,溫度是穩穩的50℃。
kI的值越大,積(jī)分時乘的係數就越大,積分效果越明顯。
所以,I的作用就是,減小靜態(tài)情況下的誤差,讓受控(kòng)物理量盡可能接近目標值。
I在使用時還有個問題:需要設定積分限(xiàn)製。防止在剛開(kāi)始加熱時,就把積分量積得太大,難以控製。
本文(wén)來源於網絡,版權歸原作者所有。但因轉(zhuǎn)載眾多,無法(fǎ)確認原作者,故僅標明轉載來源(yuán)。
上(shàng)一篇:變頻器如何實現模擬量閉環控製?
服務熱(rè)線:0371-60298207 13383812899
公司傳真:0371-60298207
公司(sī)郵箱:nhauto@scyhsy.com
公司地址(zhǐ):河南省新(xīn)鄭市薛(xuē)店鎮中德產業園(yuán)47-4號樓
 官方微信公眾號
官方微信公眾號